前言
目前的版本细则出之前编写和思考的,等细则出后会进一步改进。
2024.11.20
赛题分析
独轮目前的规则就和图中一样
通过转圈寻找亮光信标并循迹。
在哪转圈?
比赛刚开始时发车出去后达到指定速度后才可转圈
,下面方案都是在发车后的设想。
方案1:在原地转圈。
-优点:能够快速的找到下一个发光信标并进行循迹。 -缺点:需要转圈的半径更小,不然可能会出现围着光电信标转的尴尬情形。
方案2:回到场地中心再进行旋转。
-优点:能够比较稳定的进行寻找,而且在对应的地点中旋转也能更简便的对信标位置进行处理(下文中会讲到)
-缺点:显而易见的,从信标处回到场地中心必须要路程,对比方案1直接走到另一个信标处路程会更加远。
信标的处理
在处理信标上我也有两个方案。
处理方案:
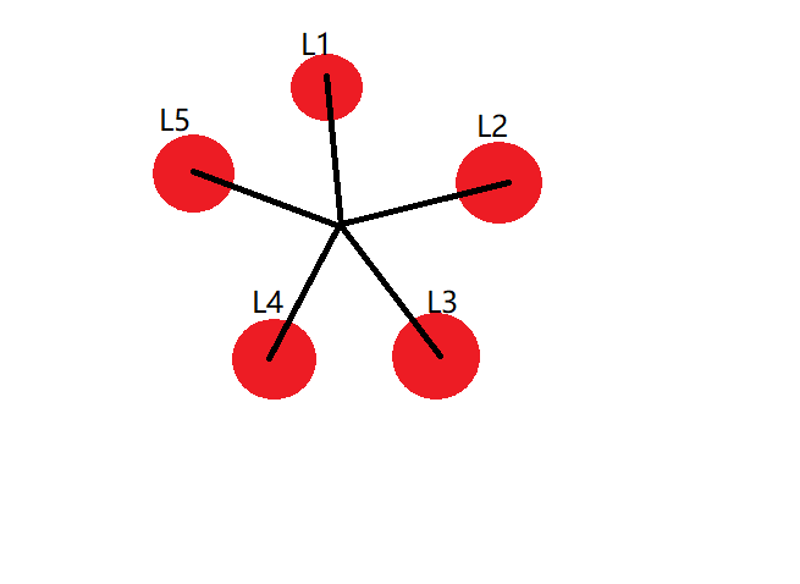 假设信标如图中红圈摆放方式摆放,黑线等长连接场地中心。
假设信标如图中红圈摆放方式摆放,黑线等长连接场地中心。
通过九轴传感器计算出车辆当前的yaw值,通过yaw值粗判断对应信标的"编号"。
例如我在转圈中发现了上图中L1是发亮的,我要通过yaw值去判断这个信标是上图五个信标中哪个信标。 而车的位置会影响每个信标对应的yaw值。
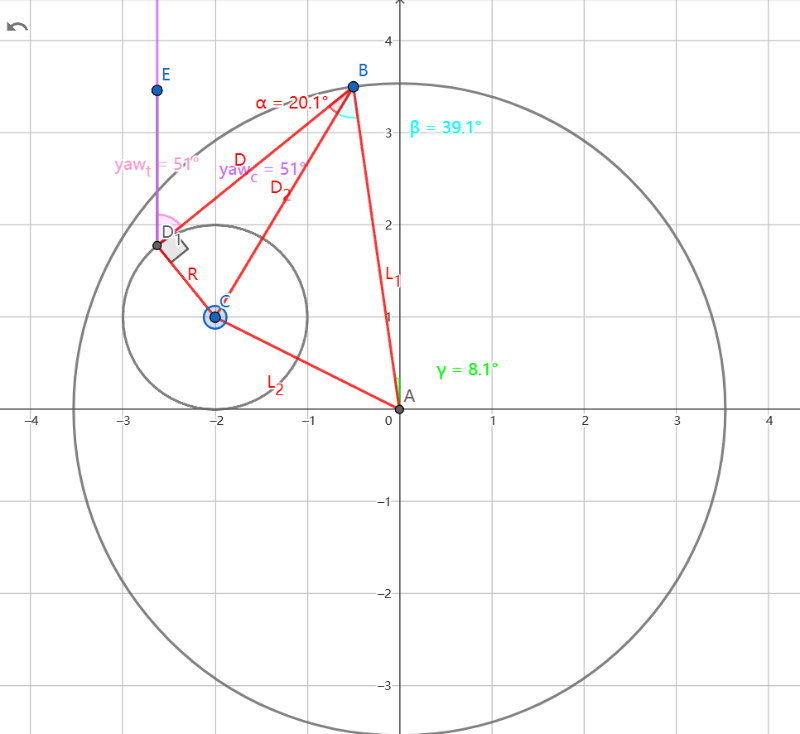 如图所示,通过UWB室内定位我们可以获取到场地中心和车的距离,场地中心和信标的距离,在能够控制转圈半径的情况下,我们可以得到图上的R,D1,D2,L2,L1。再通过勾股定理便可以算出途中的α和β,通过UWB室内定位得出的坐标(场地中心和目标信标)可以计算出γ的值**(值得一提的是,γ的正负情况对结果的影响很大)**
如图所示,通过UWB室内定位我们可以获取到场地中心和车的距离,场地中心和信标的距离,在能够控制转圈半径的情况下,我们可以得到图上的R,D1,D2,L2,L1。再通过勾股定理便可以算出途中的α和β,通过UWB室内定位得出的坐标(场地中心和目标信标)可以计算出γ的值**(值得一提的是,γ的正负情况对结果的影响很大)**
而yaw的值就为α+β+γ(注意三值正负)。
经过数学模型的测试,无论车辆在信标的何处都可以使用此方法计算对应的yaw值。
循迹
经过上面的处理后,车辆应该知道每个亮灯的信标编号以及位置,之后可直接通过UWB进行循迹。但是我们需要一个最优解,及是路程的最优解,让路程最小化便是本思路的核心。
我们可以通过车辆坐标和每一个亮灯信标坐标进行计算路程,然后再通过车辆坐标去计算路程。
或者把每条路的总长都计算出来,但是这样会最多会有120个结果。
待更新
注意:本文归作者所有,未经作者允许,不得转载
